Zurück zu Projekten
Abgeschlossenes Projekt
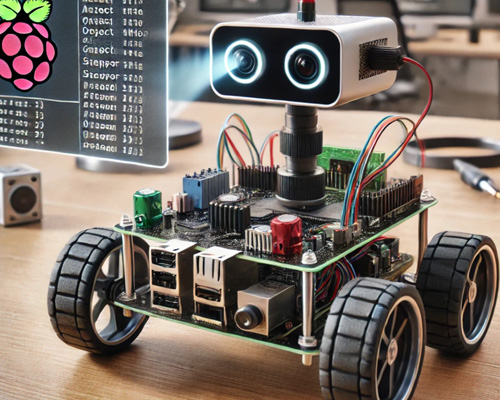
KI-gesteuertes Objekt
Eine autonome Robotikplattform mit Echtzeit-Computer-Vision und Deep-Learning-Fähigkeiten zur intelligenten Objekterkennung und -interaktion.
6
Kameramodule
15
Objektklassen
98%
Erkennungsrate
10
Wochen bis zur Fertigstellung

